本文已收录到:清华大学操作系统课程笔记 专题
处理机调度
处理机调度概念
处理机调度

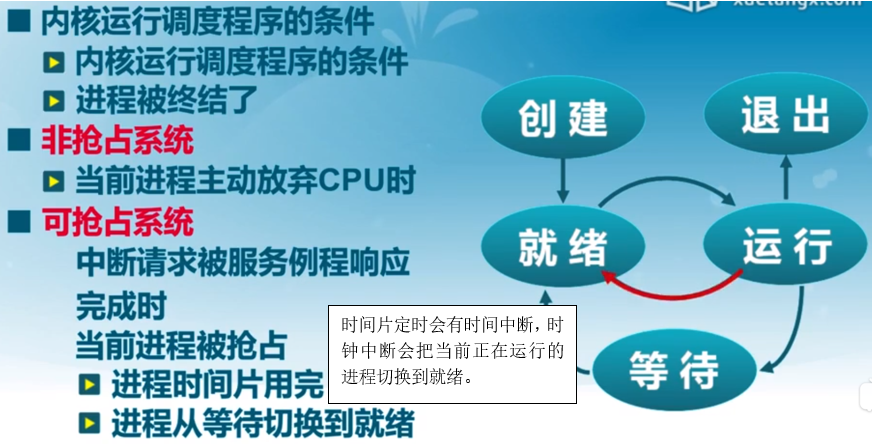
调度时机
非抢占系统

可抢占系统
调度准则
调度策略:从就绪队列中选择进程

实现调度策略
例如在前面的缺页置换算法中,指标就是缺页的次数。
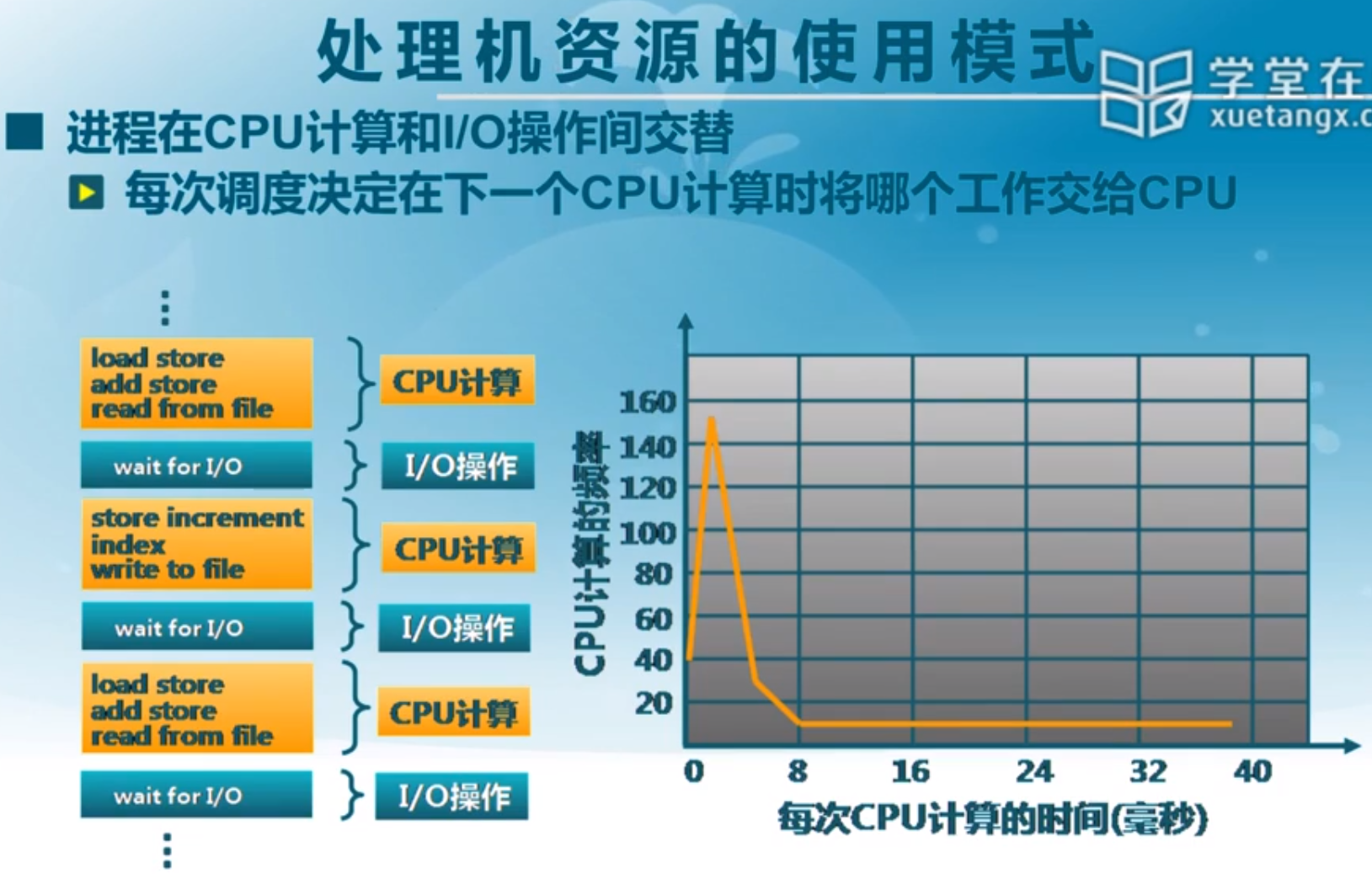
解释上图:我们发现,CPU执行一个计算,它的耗时通常在8ms以内,这就是我们分配时间片的重要依据。如果分配的时间片大于8ms,显然就会浪费。

当然是将就绪状态交给CPU。就绪进程有多个怎么选择??——第一个问题
没执行完,被迫放弃CPU。——选择合适的时间片
用什么指标度量调度算法的好坏?
从硬件的角度来讲:
从用户的角度来讲:
似乎这是矛盾的吧???你总不能让硬件消耗低,用户感受还好。
不让吃饭,还要求能干活??
吞吐量&延时

低延迟目标

吞吐量目标
公平性目标

不同场合,对公平性的定义是不一样的。

调度算法
先来先服务算法(FCFS)——按到就绪队列里的先后顺序

如果换一个顺序:
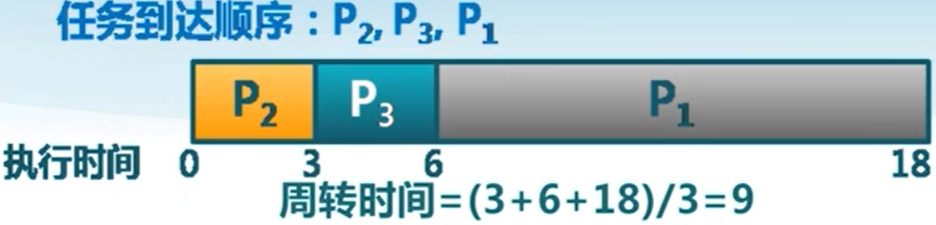
此算法周转时间跟顺序有很大的关系,如果不行排在需要很长的计算时间的进程后面,就会等很久。
短进程优先算法——考虑进程的特征
短作业优先(SJF)、短剩余时间优先(SRT):一个进程正在执行,新来的进程比之前那个进程所消耗的剩余时间还短的话,我允许你插队,先执行。
短进程优先算法的优点:减少平均周转时间
考虑到进程的执行时间这一特征。选择执行时间最短的进程先执行。当然,这是预期时间。
队列中按照预期执行时间顺序排序,短时间最优先。

如果这时候来了一个进程,他的预期时间更少,则允许他抢先执行。
短进程优先算法有最优平均周转时间的特性,下面的周转时间一定比上面的大,所以调整执行顺序是可以减少平均周转时间的。
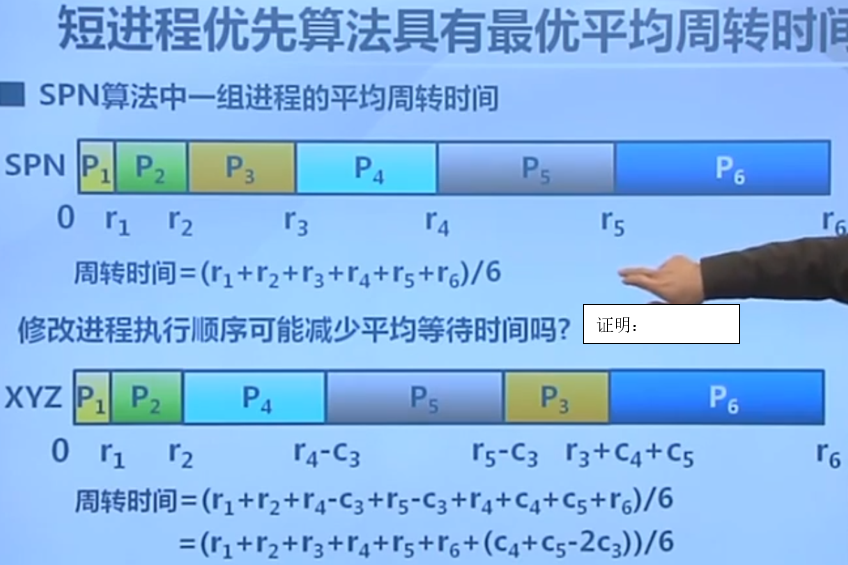
短进程优先算法可以保证最短的、最优的周转时间。
短进程优先算法的缺点:连续进来短进程会产生饥饿问题
由“用户”说自己的进程需要多久时间,如果超时就停止:
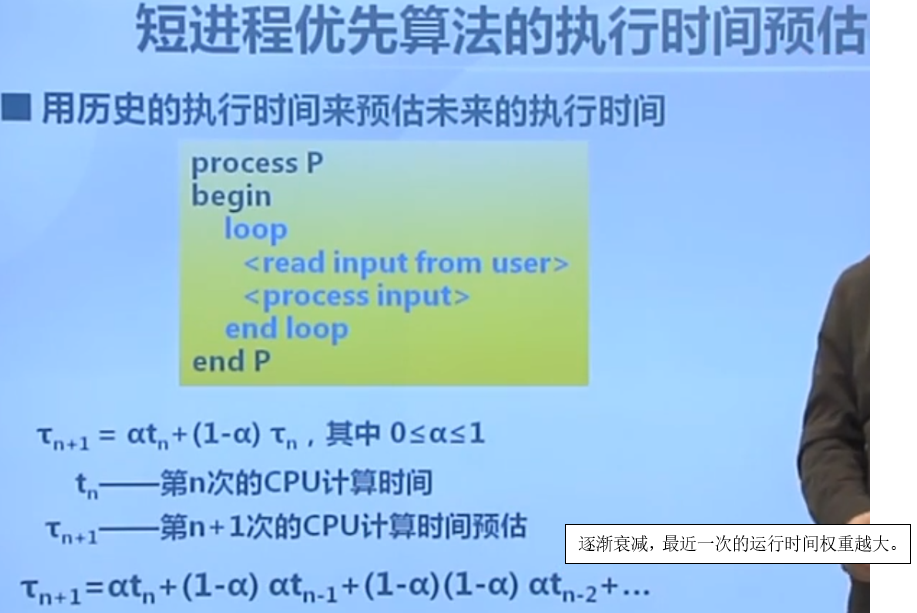
如果“用户”也不知道需要多久呢?跟前面的虚存置换一样,预测未来时间是不可能的。可以用历史的执行时间来预估将来的执行时间。
α表示衰减系数,越靠前面,权重逐渐降低。
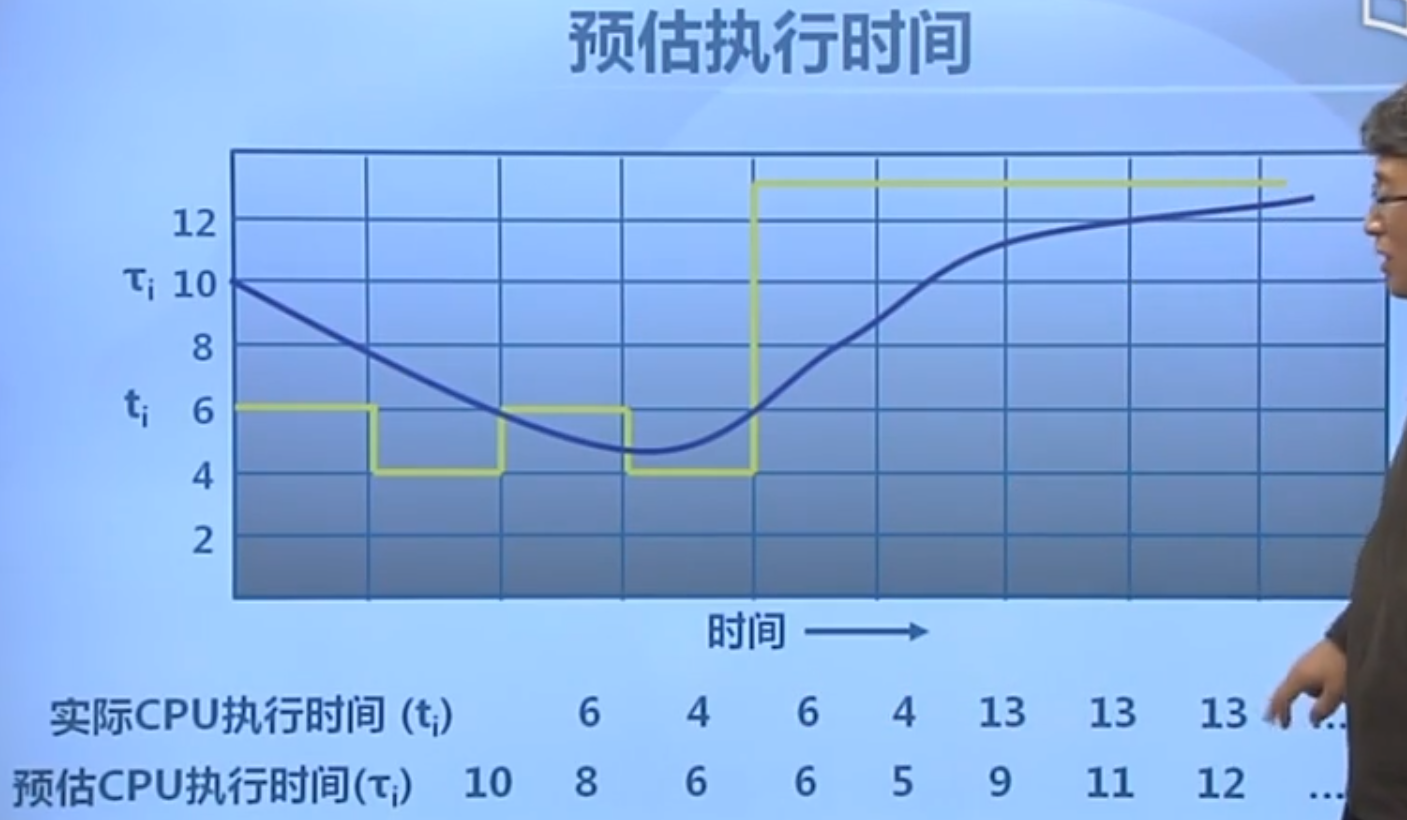
如下图所示,黄色是实际时间,蓝色是预估时间,可以做到一定的拟合。
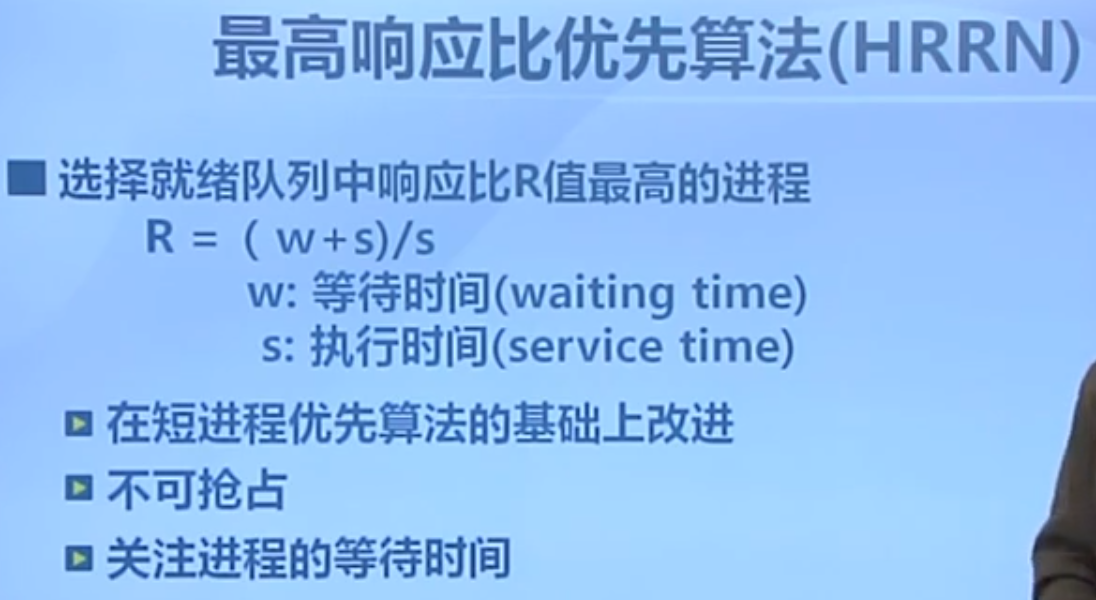
最高响应比优先算法(HRRN)——避免饥饿、考虑进程的等待时间
基本思想:选择就绪队列中响应比R值最高的进程。
R值计算方法是 R = (等待时间+执行时间)/执行时间。等待时间越长、执行时间越短的进程R值越高,越优先。
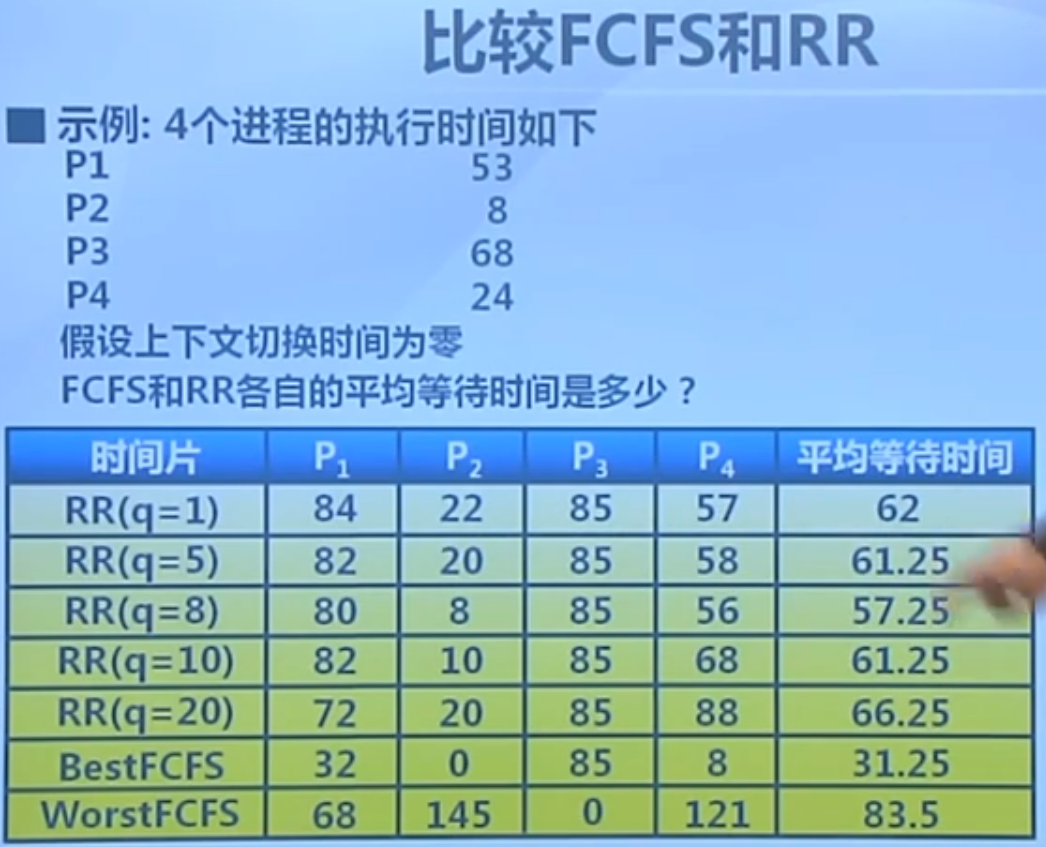
时间片轮转算法(RR)(lab6)——按时间片先来先服务,限制时间

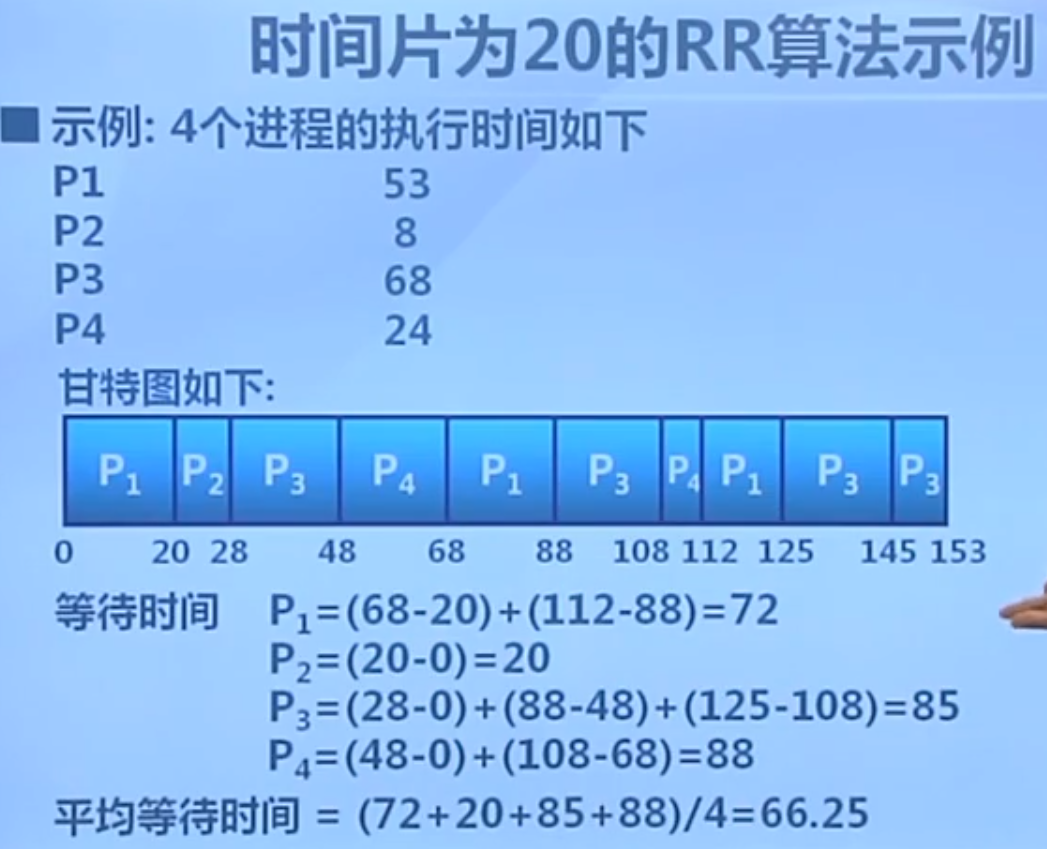
时间片长度的选择,如果太小会产生大量的上下文切换影响系统开销。如果太长,极端情况下会退化为先来先服务算法。所以此算法的前提是选取合适的时间片。

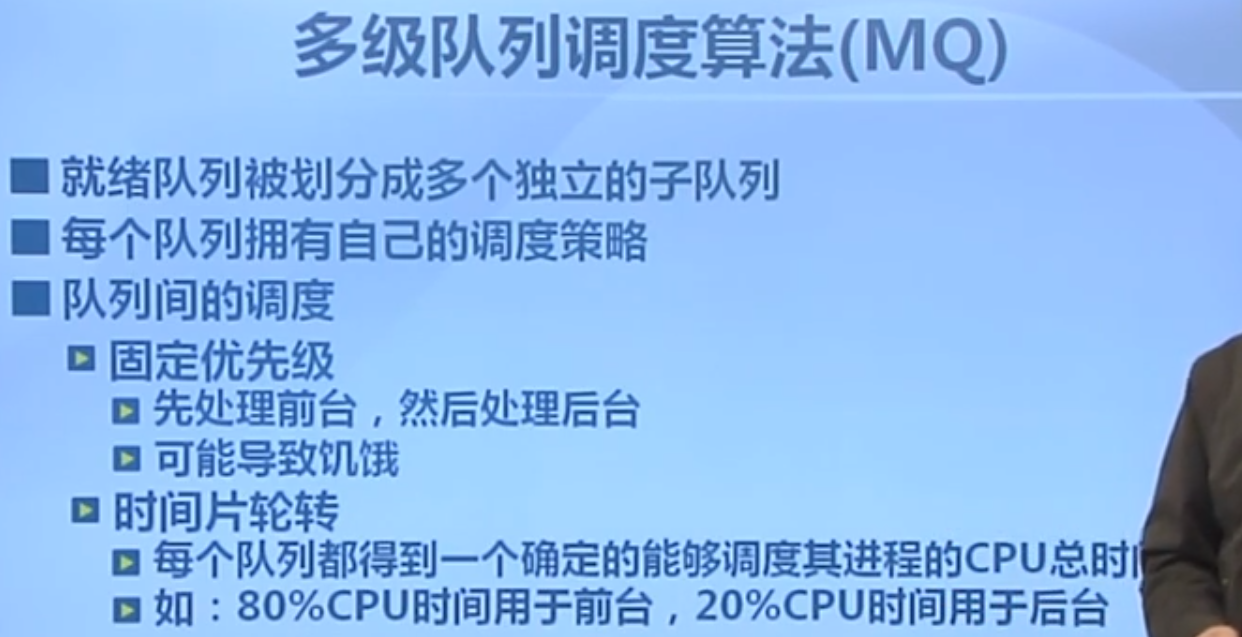
多级队列调度算法(MQ)——上面的多个算法组合在一起。
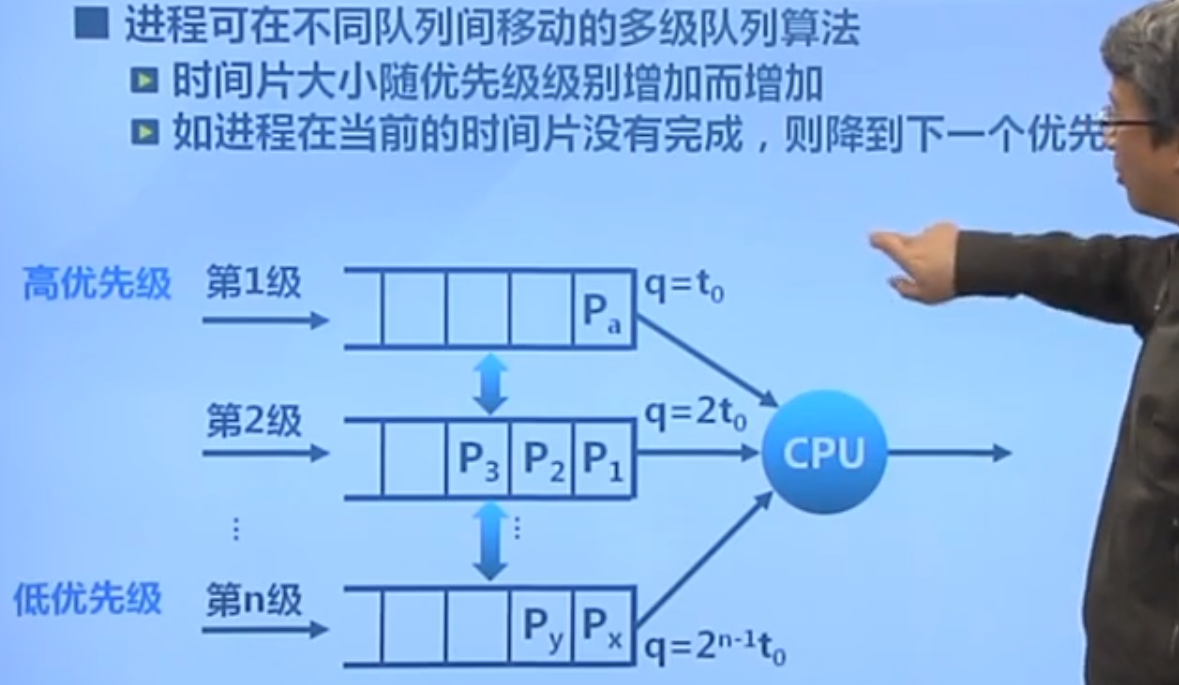
多级反馈队列算法(MFQ)——一个进程可以“来回横跳”
刚在的多级队列调度算法中,各个队列之间是没有交流的。现在允许进程可以一会儿再队列A中,一会儿在队列B中。
下图重要,仔细观察。
- 每个进程刚上来都是在最高优先级,如果没在规定时间执行完,就会降级。
- 优先级越高的话,他的时间片越少。只管的感觉是——大家都很忙,每个人时间都很少,快节奏,而下面优先级低的就像小城市,大家都不着急,所以每个人时间就长点呗。

公平共享调度算法(FSS)——进程所占资源公平

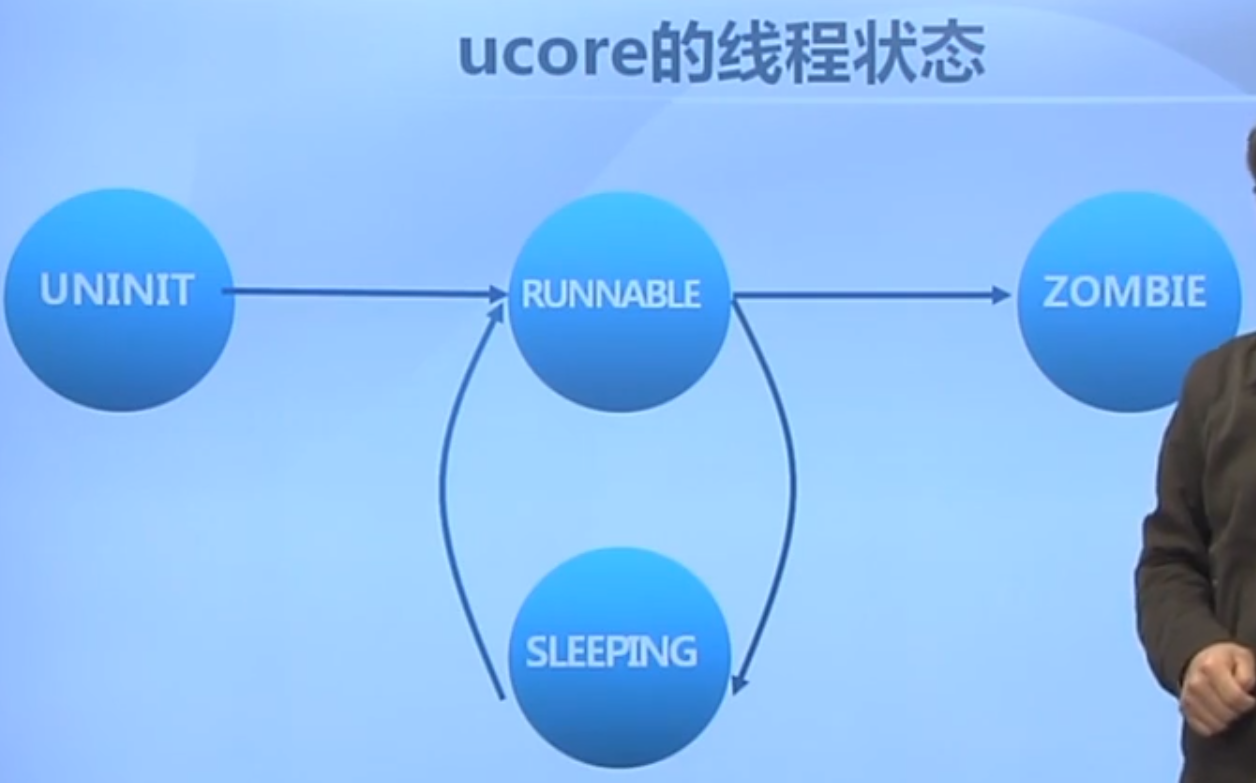
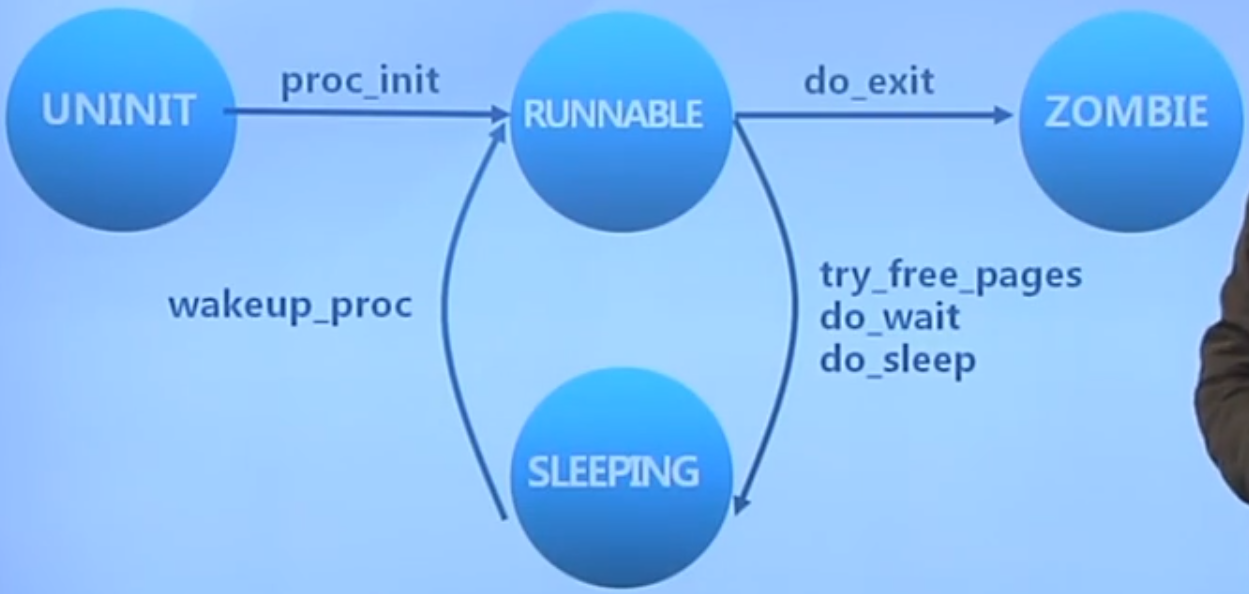
ucore 4线程状态
ucore的调度时机和进程切换

